What is an Accelerometer Sensor?
The rate of change of velocity of the body with reference to time is named acceleration. consistent with relative theory, depending upon the relative object taken to live acceleration, there are two sorts of acceleration. the right acceleration, which is that the physical acceleration of the body relative to inertia or the observer who is at rest relative to the thing being measured.

The coordinate acceleration depends upon the selection of frame of reference and selection of observers. this is often not adequate to proper acceleration. The accelerometer sensor is that the mechanical device wont to measure the right acceleration of the thing.
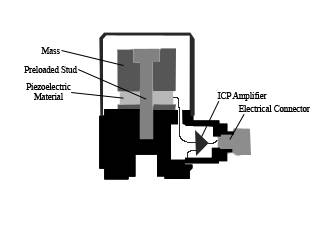
Working Principle
The basic underlying working rule of an accelerometer is like a dumped mass on a spring. When acceleration is experienced by this device, the mass gets displaced till the spring can easily move the mass, with an equivalent rate adequate to the acceleration it sensed. Then this displacement value is employed to live the give the acceleration.
Accelerometers are available as digital devices and analog devices. Accelerometers are designed using different methods.
Where to Use MPU6050
The module also has two auxiliary pins which will be wont to interface external IIC modules sort of a magnetometer, however, it’s optional. Since the IIC address of the module is configurable quite one MPU6050 sensor is often interfaced with a Microcontroller using the AD0 pin. This module also has well documented and revised libraries available hence it’s very easy to use with famous platforms like Arduino. So if you’re trying to find a sensor to regulate motion for your RC Car, Drone, Self-balancing Robot, Humanoid, Biped or something like.
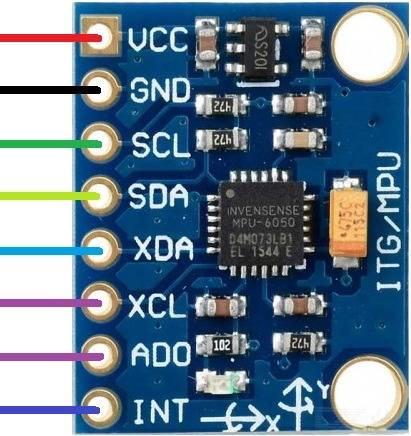
MPU6050 Pin Configuration
| PIN NUMBER | PIN NAME | DESCRIPTION |
| 1. | VCC | +3V to +5V. |
| 2. | GND | Ground is connected to Arduino |
| 3. | SCL | Serial Clock |
| 4. | SDA | Serial Data |
| 5. | XDA | Auxiliary Serial Data |
| 6. | XCL | Auxiliary Serial Clock |
| 7. | AD0 | AD0 If more than one MPU6050 |
| 8. | INT | Interrupt |
Calculations
- Accelerometer full-scale range of 2g with a Sensitivity multiplier of 16,384 LSB(Count)/g.
- Gyroscope full-scale range of 250 °/s with a Sensitivity multiplier of 131 LSB (Count)/°/s.
then, - To get sensor data, we’d like to first perform 2’s complement on sensor data of Accelerometer and gyroscope.
- After getting sensor data we will calculate acceleration and angular velocity by dividing
- sensor data with their sensitivity multiplier as follows, Accelerometer values in g (g force).
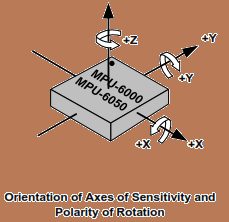
- Acceleration along the X axis = (Accelerometer X axis raw data/16384)g.
- Acceleration alongside the Y-axis = (Accelerometer Y-axis raw data/16384)g.
- Acceleration alongside the Z-axis = (Accelerometer Z-axis raw data/16384)g.
- Gyroscope values in °/s (degree per second)
- Angular velocity along the X-axis = (Gyroscope X-axis raw data/131)°/s.
- Angular velocity along the Y-axis = (Gyroscope Y-axis raw data/131)°/s.
- Angular velocity along the Z-axis = (Gyroscope Z-axis raw data/131)°/s.
- Temperature value in °/c (degree per Celsius)
- Temperature in degrees C = ((temperature sensor data)/340 + 36.53)°/c.
For example, - Suppose, after 2’ complement we get
- accelerometer X axes raw value = +15454
- Then Ax = +15454/16384 = 0.94 g.
Features:
- On-board MPU – 6050 integrated 6 axis motion processing chip
- On-board LDO chip, support 5 V / 3.3 V voltage input
- Commonly used pin have been brought out with a standard 2.54mm spacing
- Module support IIC standard communication protocol
- Users can control program of the accelerator full grid sensor in the range of ±2g, ±4g, ±8g, and ±16g
- Angular velocity full case sensing range for ±250, ±500, ±1000, and ±2000dps
- Digital Motion Processing™ (DMP™) engine offloads complex MotionFusion, sensor timing synchronization, and gesture detection
- Embedded algorithms for run-time bias and compass calibration. No user intervention required
- On-chip ADC & temperature sensor to measure the MPU-60X0 die temperature
Applications
The Applications of Accelerometer sensor are as follows:
- For inertial navigation systems, highly sensitive accelerometers are used.
- To detect and monitor vibrations in rotating machinery.
- To display images in an upright position on screens of digital cameras.
- For flight stabilization in drones.
- Accelerometers are used to sense orientation, coordinate acceleration, vibration, shock.
- Used to detect the position of the device in laptops and mobiles.
- Machinery health monitoring.
- To detect faults in rotator machines.
- These are also used for building and structural monitoring to measure the motion and vibration of the structure when exposed to dynamic loads.
- To measure the depth of CPR chest compressions.
- Navigation systems make use of accelerometer sensors for knowing the direction.
- Remote sensing devices also use accelerometers to monitor active volcanoes.
Read more Microcontroller Sensors
- Microphone Sensor
- Light Detection Resistor Sensor LDR
- Thermal Sensor
- Rotary Encoder Sensor
- Gas Sensor
- Force Sensor
- Humidity Rain Detection Sensor
- Temperature Humidity Sensor
- RF Transmitter Receiver
- Barometric Pressure Sensor
- Flame Sensor
- Current Sensor
- Flex Sensor
- Pulse Sensor
- Color Sensor
- Tilt Sensor